小米发布并开源首代机械VLA大模子,刷新多项SOTA
2026-02-12 13:14:19
2月12日消息,小米正式发布并开源首代机器人VLA大模型——Xiaomi-Robotics-0。
该模型拥有47亿参数,核心解决了传统VLA模型推理延迟、真机动作不连贯的行业痛点,兼具视觉语言理解与高性能实时执行能力,可在消费级显卡上实现实时推理,在仿真测试和真机任务中均刷新多项SOTA成绩。

Xiaomi-Robotics-0采用Mixture-of-Transformers(MoT)混合架构,通过“视觉语言大脑+动作执行小脑”的组合,实现感知、决策、执行的高效闭环,兼顾通用理解与精细动作控制。
视觉语言大脑(VLM):以多模态VLM大模型为底座,能精准理解人类模糊自然指令,同时捕捉高清视觉输入中的空间关系,是模型的“决策核心”;
动作执行小脑(Action Expert):嵌入多层Diffusion Transformer(DiT),不直接输出单一动作,而是生成高频、平滑的“动作块”,并通过流匹配技术保障动作精准度,让机器人动作更具物理灵活性。
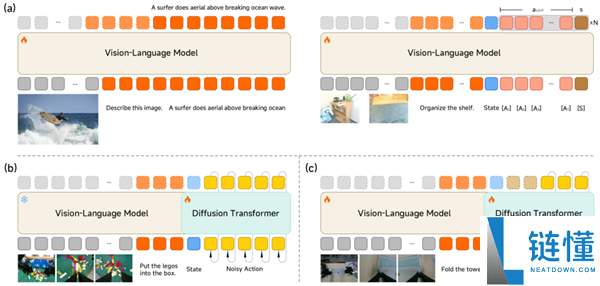
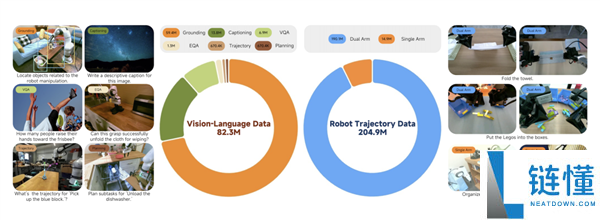
为避免模型学动作丢失基础理解能力,小米设计了跨模态预训练+后训练的两阶段训练方法,让模型既懂常识又精通体力活。
跨模态预训练:先通过多模态与动作数据混合训练,引入Action Proposal机制让VLM的特征空间与动作空间对齐;再冻结VLM专注训练DiT,使其从噪声中恢复精准动作序列,保障动作的平滑性;
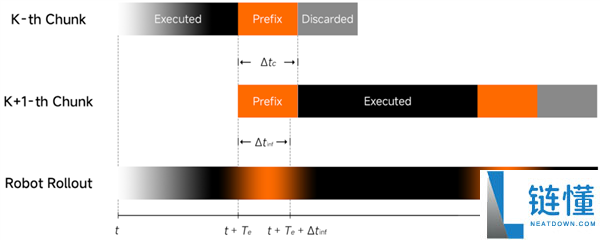
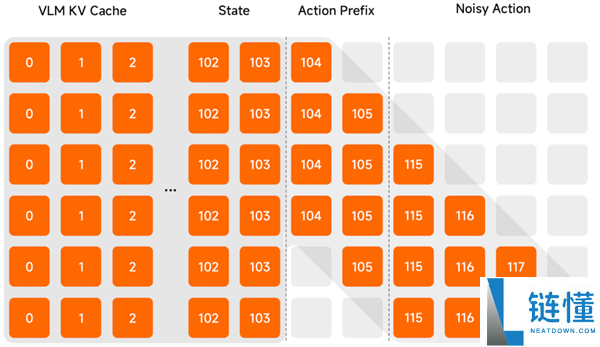
后训练:这是解锁物理智能的核心,采用异步推理模式从机制上解决真机“动作断层”问题;同时引入Clean Action Prefix保障动作轨迹时间连续性,通过Λ-shape Attention Mask让模型聚焦当前视觉反馈、摆脱历史惯性,大幅提升机器人对环境突发变化的响应能力。
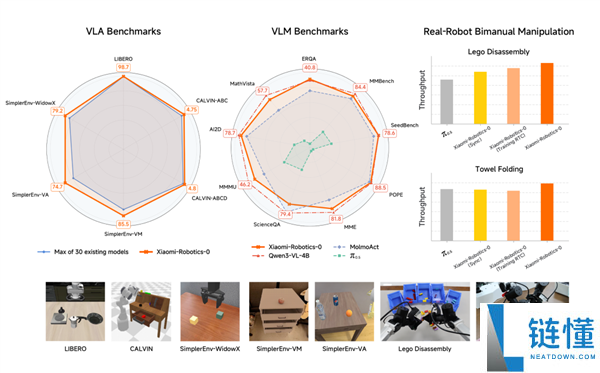
实测该模型在多维度测试中均展现出行业领先水平,实现“仿真通、真机强、多模态能力不丢失”的突破。
仿真测试:在LIBERO、CALVIN、SimplerEnv三大主流仿真测试的所有Benchmark中,对比30种现有模型均取得当前最优结果;
真机任务:在双臂机器人平台部署后,面对积木拆解、叠毛巾等长周期、高难度任务,展现出极高的手眼协调性,能灵活处理刚性积木和柔性织物等不同材质物体;
多模态能力:保留了VLM本身的物体检测、视觉问答、逻辑推理等能力,在具身相关基准测试中表现优异,弥补了传统VLA模型重动作、轻理解的短板。
小米已将Xiaomi-Robotics-0的技术主页、开源代码、模型权重全量开放,相关资源可分别在GitHub、Hugging Face等平台获取,为全球具身智能领域的开发者和研究机构提供免费技术支持。
 相关阅读
相关阅读
-
CoinEx赞助第33届非洲杯,加密货币积极拥抱非洲体育链百科 2026-02-12 13:11:34

-
如何在直播视频软件中制作精彩的三叶草播种视频链资讯 2026-02-12 13:10:18

-
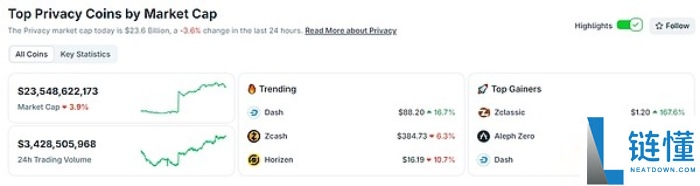
隐私币大涨背后:昙花一现还是曙光来临?隐私币未来行情分析链知识 2026-02-12 13:09:07
-
人类首个外星定居点将开工建造,马斯克:咱们必需要去月球链资讯 2026-02-12 13:08:47

-
全面解析“okey钱包”:数字支付时代的新选择链百科 2026-02-12 13:07:10

-
这才是真人版,网友用AI复原《海贼王》罗宾上船名局面链资讯 2026-02-12 13:03:09

-
欧美MV与日韩MV的对比:音乐视频文化的差异分析链百科 2026-02-12 13:01:43

-
探索电鸽破解版无限入口:直播视频软件的新选择链知识 2026-02-12 12:57:52

-
15秒放水1000吨,我国首个载人登月发射工位初次点火链资讯 2026-02-12 12:57:34

-
迎接橄榄球世界杯(RLWC),CoinEx推出联名NFT链百科 2026-02-12 12:57:26